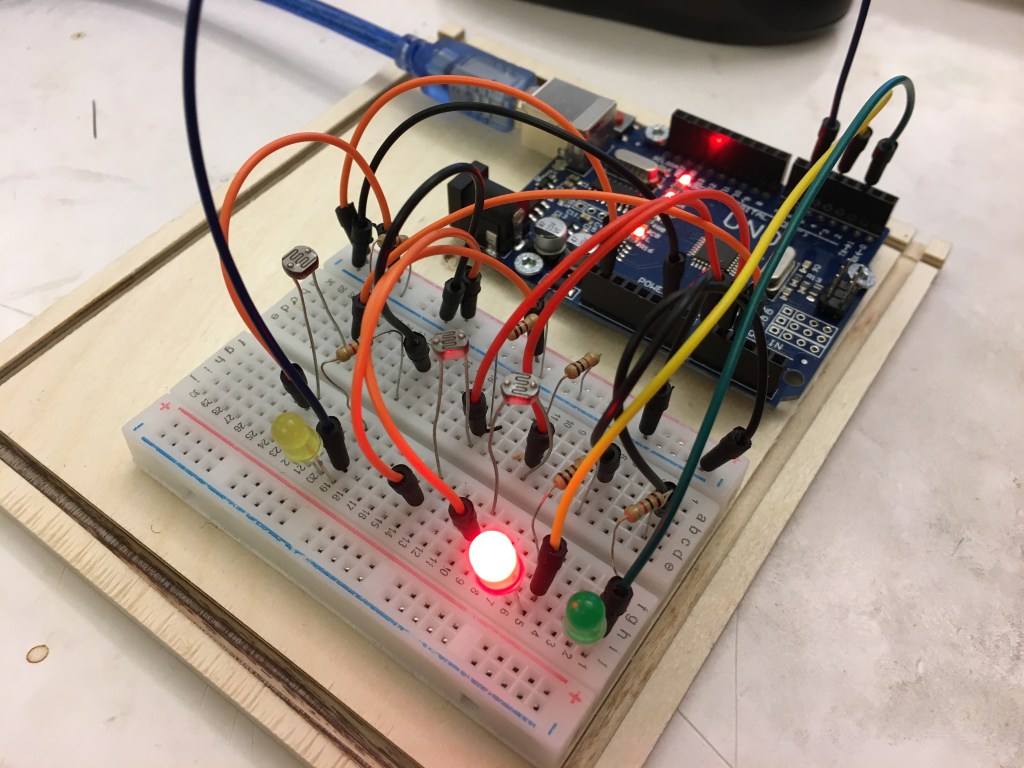
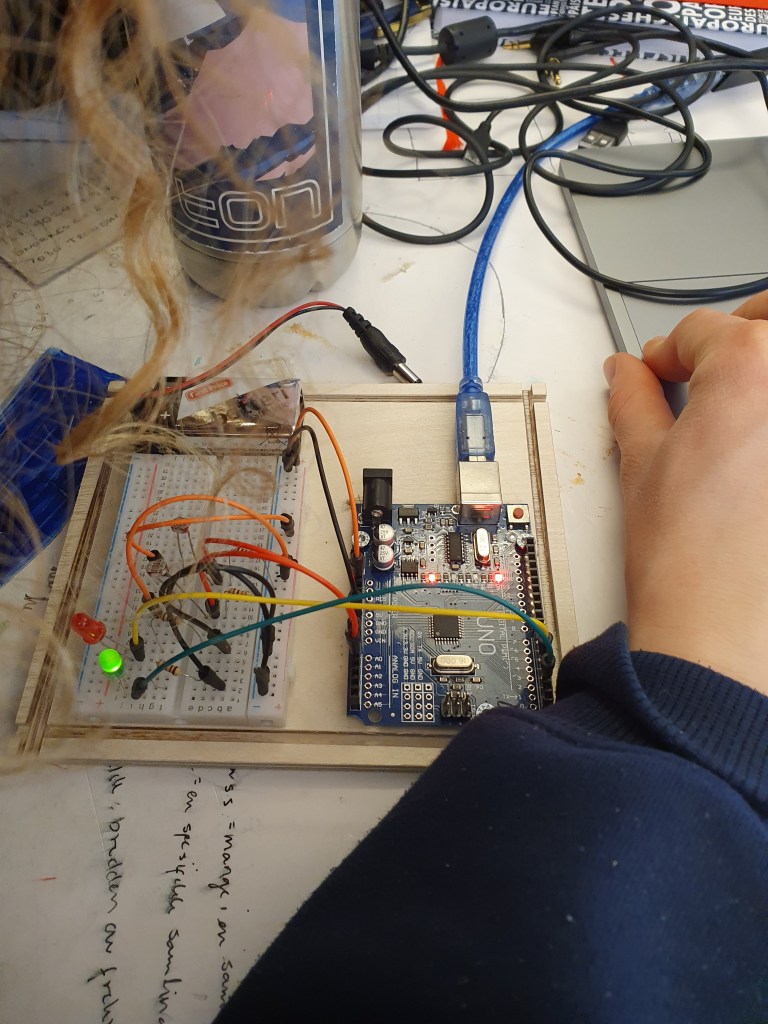
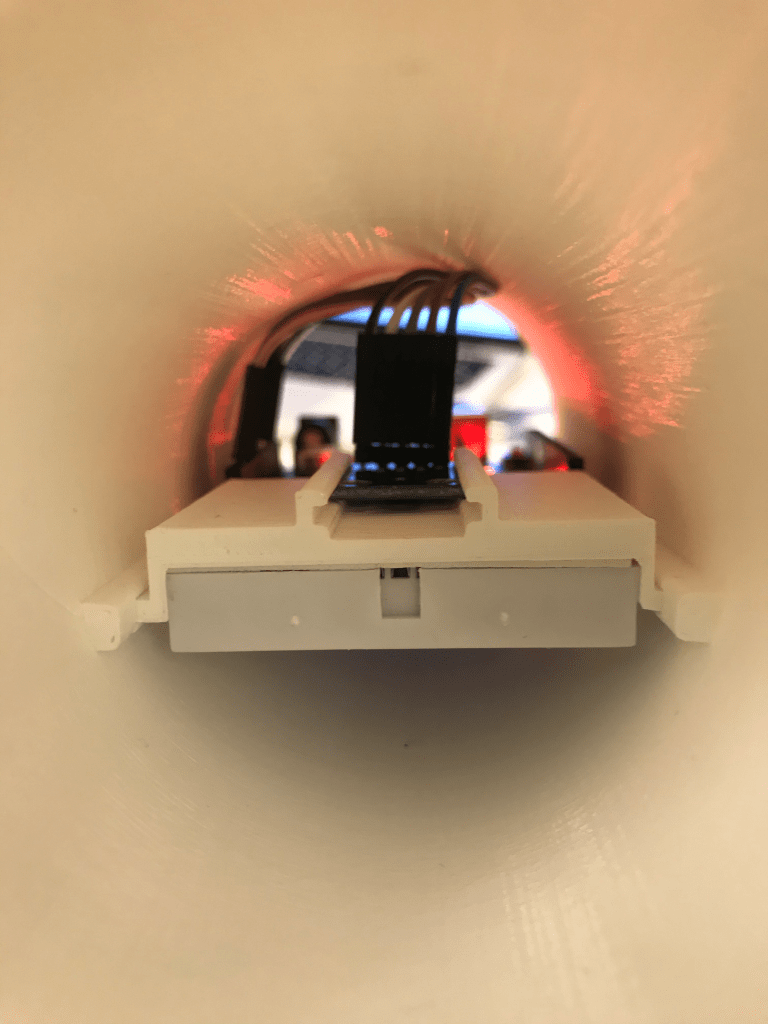
I dag har Lorentz og Åsmund jobbet med akselerometeret. Vi har jobbet med lesing av data samt filtrering av støy. Vi har lagd en veldig enkel prototype av røret. Se bildet nedenfor fra innsiden av røret. Vi prøvde å legge til bluetooth for å lese av data trådløs, men fant ut at det var like lett med en litt lengre ledning. Bluetooth viser seg ustabil uansett.
Vi har funnet ut av 3 ting:
- Me får til å hente bra data fra akselerometeret
- Vi trenger både gyroskop og akselerometer for å få høy nok presisjon. Med kun akselerometer får vi en oppløsning på ca. 5 til 10 grader, noe som ikke eigner seg til å se hvor stødig en person står. Vi vurdere fortsatt hensikten med akselerometeret, men se for oss at vi trenger etterhvert kombinert akselerometer og gyroskop (IMU.)
- Vi trenger ikke akselerometer til første prototype siden vi bruker en kombinasjon av lys-sensorer for å registerer fullstending balansering og posisjonering på bakken.
Nå tenker vi å gå sammen hele gruppen og planlegge hva som egentlig kreves for å lage første prototype.
Over og ut fra Lo Rida og KeshÅ